산업 위치 설정 및 핵심 수요듀얼 액시스 웨이퍼 씬닝 머신은 반도체 제조 후단 패키징의 핵심 장비로, 듀얼 액시스 동기 연마를 통해 웨이퍼의 조연마와 정밀 연마를 실현한다. 웨이퍼 두께를 신속하게 줄이는 동시에 표면 거칠기를 향상시키며, 가공 정밀도는 칩의 방열 성능, 패키징 밀도 및 신뢰성에 직접적인 영향을 미친다.
반도체 소자가 박형화·고밀도화 방향으로 발전함에 따라 시장은 엄격한 요구사항을 제시하고 있다: 평면도 ≤2μm, 총 두께 편차(TTV) ≤3μm. 6-12인치 다양한 규격 웨이퍼와 탄화규소·질화갈륨 등 신형 경질 취성 재료에 대응해야 한다.
현재 핵심 기술 과제
고정밀 제어 과제초박형 웨이퍼(<50μm) 가공 시 응력으로 인한 휨 현상이 발생하기 쉽고, warp 변동이 임계값을 초과하기 쉽다. 경질 취성 재료는 경도가 높고 취성이 커, 연마 시 미세 균열과 가장자리 깨짐 현상이 발생하기 쉬워 가공 효율과 표면 품질을 동시에 만족시키기 어렵다.
장비 안정성 및 신뢰성 병목그라인딩 휠의 장기 운전 시 형상 변형이 발생하기 쉽고, 실시간 보상 알고리즘의 정밀도 부족이 가공 일관성에 영향을 미친다. 기존 진공 또는 기계식 클램핑 방식은 초박형 웨이퍼 변형·파손을 유발하기 쉬워 정밀도 향상을 제약한다. 온도 변동·진동 등 환경 요인은 듀얼 액시스 협업 정밀도에 큰 간섭을 미치며, 극한 환경에서의 안정적 가공 기술은 아직도 개선이 필요하다.
핵심 돌파 경로
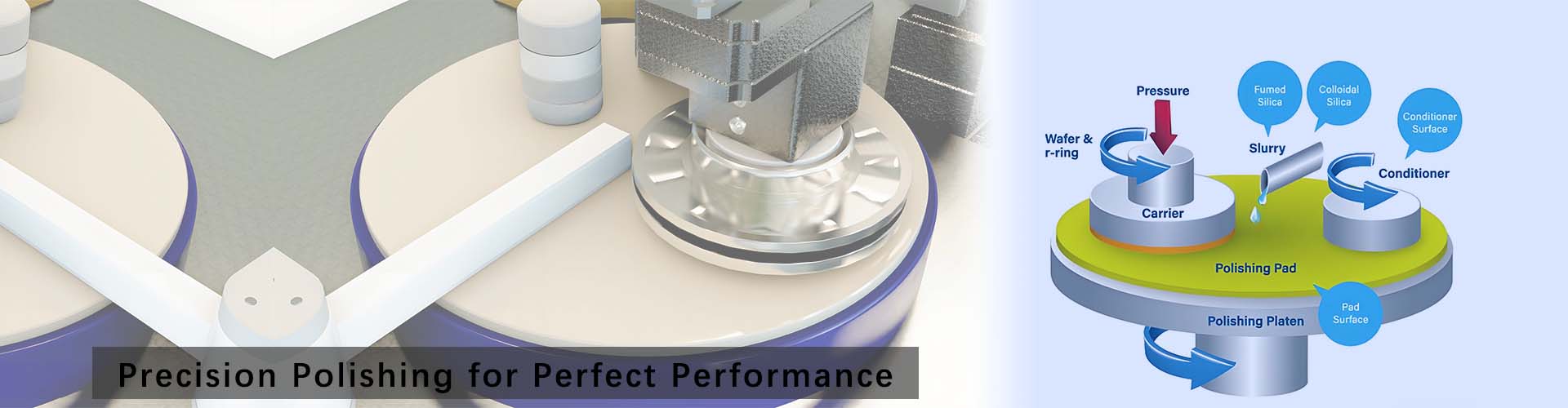
고정밀 제어 기술 혁신서보 모터 + 그레이팅 룰 폐루프 피드백 시스템을 채용해 듀얼 액시스 회전 속도·압력의 ±0.1% 동기 정밀도를 실현하고, 적응형 알고리즘과 결합해 평면도를 2μm 이내로 안정적으로 제어한다. 레이저 간섭 측두 모듈을 통합하고 PID 알고리즘을 통해 연마량을 동적으로 수정해 TTV 편차를 ≤1μm로 만든다.경질 취성 재료를 위해 「조연마-정밀 연마-폴리싱」 3단계 공정을 개발하고, 다이아몬드 초미세 그라인딩 휠과 탄성 연마 패드를 매칭해 결함률을 낮춘다.
장비 구조 및 기능 업그레이드표면 형상 온라인 검측 시스템을 탑재해 그라인딩 휠 마모를 실시간으로 모니터링하고 자동으로 다듬으며 휠 각도를 자동 조정해 장기 안정성을 보장한다. 에어 플로트 클램핑 또는 정전기 흡착 기술을 채용해 클램핑력을 균일하게 분산해 초박형 웨이퍼 손상을 방지한다. 내장형 항온 항습 시스템과 진동 감쇠 플랫폼을 통해 온도 변동을 ±0.5℃ 내로 제어하고 진동 진폭을 2μm 내로 억제해 환경 간섭을 줄인다.
핵심 부품 및 알고리즘 돌파에어 플로트 스핀들 유닛·정밀 볼 스크류 등 핵심 부품의 국산화를 추진해 기계 정밀도 기반을 다진다. 머신러닝 알고리즘을 도입해 대량 데이터 기반으로 공정 파라미터 조합을 최적화하고, 다양한 규격·재질 웨이퍼의 적응형 가공을 실현해 정밀도 일관성을 높인다.
듀얼 액시스 웨이퍼 씬닝 머신의 기술 돌파는 고정밀 제어를 핵심으로 하고, 장비 구조 업그레이드를 지지대로 삼으며, 핵심 부품 및 알고리즘 혁신을 동력으로 해야 한다. 각 분야의 협력을 통해 정밀도·안정성·재질 호환성 문제를 해결하고, 반도체 산업의 박형화·고밀도화 발전에 핵심 장비를 제공해야 한다.








 English
English русский
русский 한국어
한국어 Deutsch
Deutsch español
español italiano
italiano العَرَبِيَّة
العَرَبِيَّة